Two of my recent blog posts focused on two different, but as we will see related, methods which essentially transform observed responses into a summary of their contribution to an estimate: structural components resulting from Sen’s (1960) decomposition of U-statistics and pseudo-observations resulting from application of the leave-one-out jackknife. As I note in this comment, I think the real value of deconstructing estimators in this way results from the use of these quantities, which in special (but common) cases are asymptotically uncorrelated and identically distributed, to: (1) simplify otherwise complex variance estimates and construct interval estimates, and (2) apply regression methods to estimators without an existing regression framework.
As discussed by Miller (1974), pseudo-observations may be treated as approximately independent and identically distributed random variables when the quantity of interest is a function of the mean or variance, and more generally, any function of a U-statistic. Several other scenarios where these methods are applicable are also outlined. Many estimators of popular “parameters” can actually be expressed as U-statistics. Thus, these methods are quite broadly applicable. A review of basic U-statistic theory and some common examples, notably the difference in means or the Wilcoxon Mann-Whitney test statistic, can be found within my blog post: One, Two, U: Examples of common one- and two-sample U-statistics.
As an example of use case (1), Delong et al. (1988) used structural components to estimate the variances and covariances of the areas under multiple, correlated receiver operator curves or multiple AUCs. Hanley and Hajian-Tilaki (1997) later referred to the methods of Delong et al. (1988) as “the cleanest and most elegant approach to variances and covariances of AUCs.” As an example of use case (2), Andersen & Pohar Perme (2010) provide a thorough summary of how pseudo-observations can be used to construct regression models for important survival parameters like survival at a single time point and the restricted mean survival time.
Now, structural components are restricted to U-statistics while pseudo-observations may be used more generally, as discussed. But, if we construct pseudo-observations for U-statistics, one of several “valid” scenarios, what is the relationship between these two quantities? Hanley and Hajian-Tilaki (1997) provide a lovely discussion of the equivalence of these two methods when applied to the area under the receiver operating characteristic curve or simply the AUC. This blog post follows their discussion, providing concrete examples of computing structural components and pseudo-observations using R, and demonstrating their equivalence in this special case.
 ,
,  , the relationship between
, the relationship between  and
and  can be defined generally as
can be defined generally as![\[ y_i = m(x_i) + \varepsilon_i \]](https://statisticelle.com/wp-content/ql-cache/quicklatex.com-78fa8d7d51d22115d6a1fe5a2c1bdf3b_l3.png "Rendered by QuickLaTeX.com")
![f(x_i) = E[y_i | x = x_i]](https://statisticelle.com/wp-content/ql-cache/quicklatex.com-cce0672391a02b3395ffd209d0d01d74_l3.png "Rendered by QuickLaTeX.com") and
and  . If we are unsure about the form of
. If we are unsure about the form of  , our objective may be to estimate
, our objective may be to estimate  . Here,
. Here,  and
and  . The true function
. The true function  is displayed in green.
is displayed in green.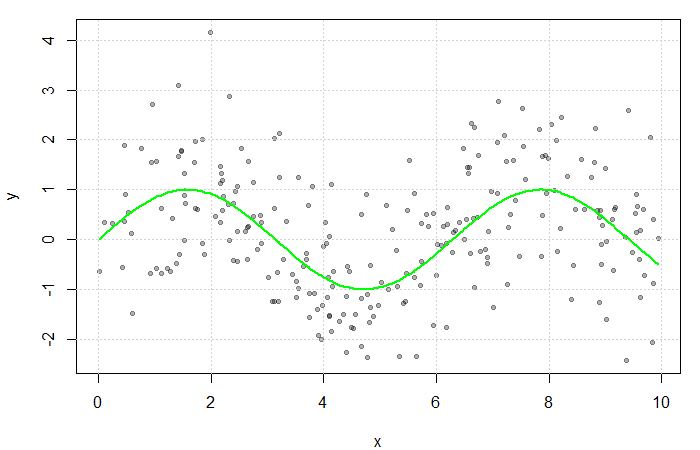
 could be estimated by averaging the value of the response at each
could be estimated by averaging the value of the response at each 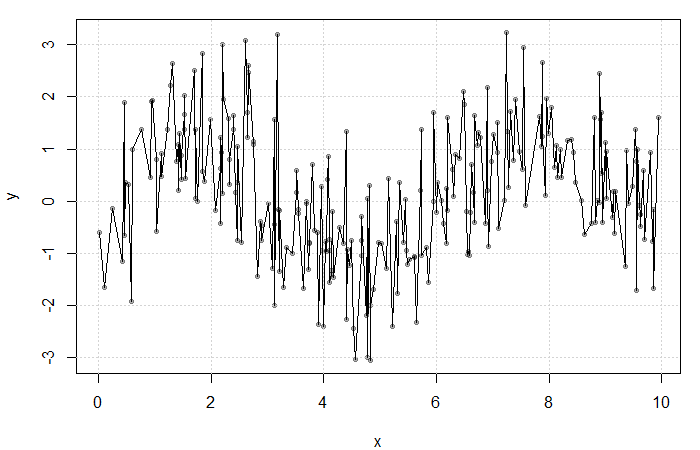
 at each
at each  . The fit is extremely rough due to gaps in
. The fit is extremely rough due to gaps in  for some bandwidth
for some bandwidth  . Then, a simple non-parametric estimate of
. Then, a simple non-parametric estimate of  can be constructed as average of the
can be constructed as average of the 
![\[ K(u) = \begin{cases} \frac{1}{2} & |u| \leq 1 \\ 0 & \text{o.w.} \end{cases} \]](https://statisticelle.com/wp-content/ql-cache/quicklatex.com-27c264e157b25fba34a6f4f7702c9ce2_l3.png "Rendered by QuickLaTeX.com")
 (see my previous blog bost). It is, however, convention to use kernel functions of degree
(see my previous blog bost). It is, however, convention to use kernel functions of degree  (e.g. the Gaussian and Epanechnikov kernels).
(e.g. the Gaussian and Epanechnikov kernels).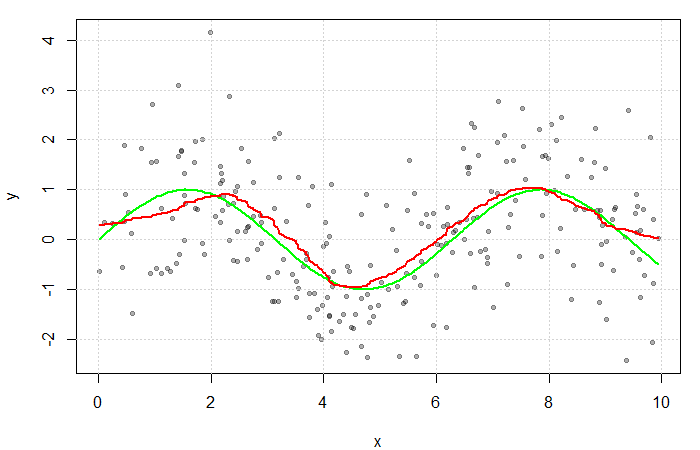
 . The green line represents the true function
. The green line represents the true function  .
.